A reference frame realizes a reference system in two ways:
- physically, by a solid materialisation of points (or observing instruments),
- mathematically, by the determination of coordinates referring to the reference system.
The coordinates of the points are computed from the measurements following the definition of the reference system.
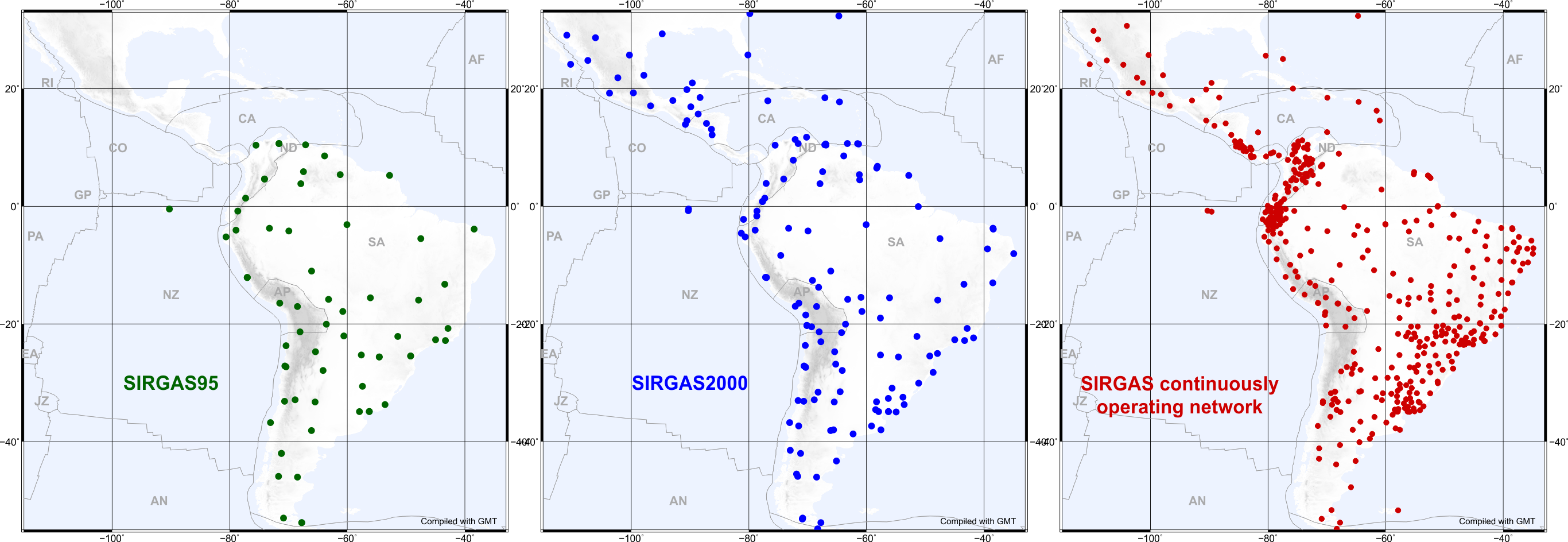
At present, the SIRGAS realizations are:
SIRGAS95: a high-precision GPS network of 58 points distributed over South America with station positions referring to ITRF94, epoch 1995.4. The coordinate accuracy of this realization is about ±3 … ±6 mm.
SIRGAS2000: a high-precision GPS network of 184 GPS stations distributed over North, Central and South America with station positions referring ITRF2000, epoch 2000.4. The coordinate accuracy of this realization is about ±3 … ±6 mm.
The SIRGAS Continuously Operating Network: a network of continuously operating GNSS stations, processed on a weekly basis to generate instantaneous weekly station positions aligned to the ITRF and multi-year (cumulative) reference frame solutions, providing station positions and velocities for those SIRGAS stations in operation for more than two years. The weekly station positions and the multiyear solutions refer to the ITRF version in use when the GNSS data is processed. The mean accuracy of the station positions at the reference epoch is about ±1.2 mm in the North and East components and about ±2.5 mm in the height. The mean accuracy of the stations velocities is estimated to be ±0.7 mm/a in the North and East component and ±1.1 mm/a in height.
The relationship between the different SIRGAS realizations is given by the transformation parameters between the corresponding ITRF solutions and the reduction of the coordinates to the same epoch. This reduction is carried out in two ways, alternatively: i) those SIRGAS continuously operating stations which have been active for more than two years apply the velocities computed in the latest multi-year solution, and ii) those stations with velocities not known from the multi-year solutions are reduced by means of the model VEMOS (Velocity Model for SIRGAS). The agreement between the different SIRGAS realizations at the same epoch is at the cm-level.
Dr.-Ing. Laura Sanchez
lm.sanchez@tum.de
80333 München
Arcisstr.21
Tel. +49 89 23031-1295
Fax +49 89 23031-1240


